画像: Mashable(AQUATIC SNAEK ROBOT)
生物が生きられない環境や瓦礫の下など、人が入り込めない場所を探索・調査を行うにはロボットが用いられます。しかし、水中の探索は基本的にダイバーを雇って調査する必要があり、あまりに危険すぎる場所や狭すぎるような場所を探索することはできませんでした。カーネギーメロン大学のバイオロボティクス研究室はこの問題を解決する「ヘビ型ロボット」を開発したとのことです。
- CMU's Snakebot Goes for a Swim | Carnegie Mellon School of Computer Science
- We want to swim with this slithering, underwater robot snake
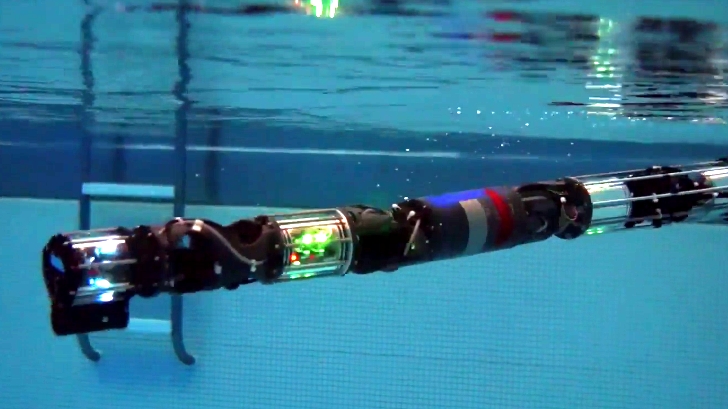
カーネギーメロン大学が開発した「ヘビ型ロボット」は形状はヘビのように細長い形状をしています。遠隔操作が必要であるものの、水中で「移動」「態勢の変更」「停止」が可能。これを使うことで「海上で大きな損傷を負った船の点検」や「水中のパイプの損傷や詰まり有無の調査」などを行うのが容易になることがわかります。
記事作成時点では、このような作業を行うのは人(ダイバー)の仕事です。当然、ダイバーを使う場合は「潜る人の体力や装備の限界」を考慮する必要があり、1日あたりの調査時間が限られるため、結果として調査期間と人件費が増加してしまう問題が生じます。

このプロジェクトを共同で行っている先進ロボティクス製造(ARM)研究所でプログラムマネージャを務めるマット・フィッシャー氏は「私は海軍で3年ほど働いていましたのでわかるのですが、船が母港やドックに入る前に故障箇所の情報が事前にわかっていれば、メンテナンスに要する時間を数週間〜数カ月短縮することが可能です」と語り、船が戻るまでに部品調達を並行して行えることなどからメンテナンス時間を大幅に削減し、人件費も節約できるとしています。
また、フィッシャー氏は海水を出し入れして船の重量を調整するバラストタンクに入って、調査をしたことがあるようです。同氏はこの経験を「かなり危険度の高い作業だった」と実感しており、「当時、ロボットで同じ調査ができたのなら、絶対に仕事をロボットに任せたはず」と語っています。
このロボットは軍用用途だけでなく、産業用途や救命用途としても応用できるため、今後の実用化が大きく期待されています。実際にロボットが動作している様子はMashableが公開しているムービーで確認することができます。